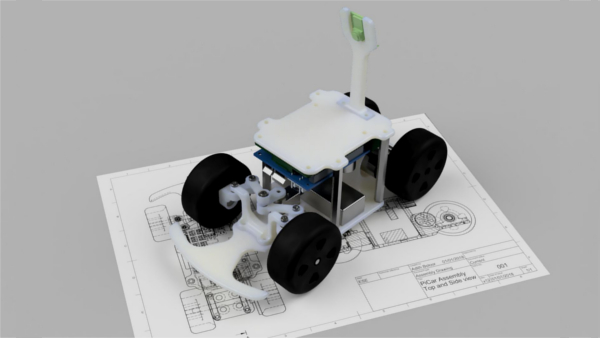
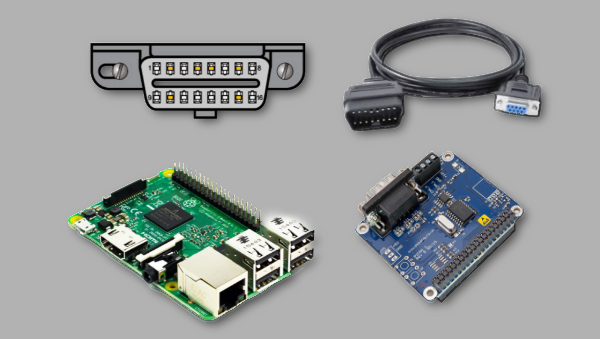
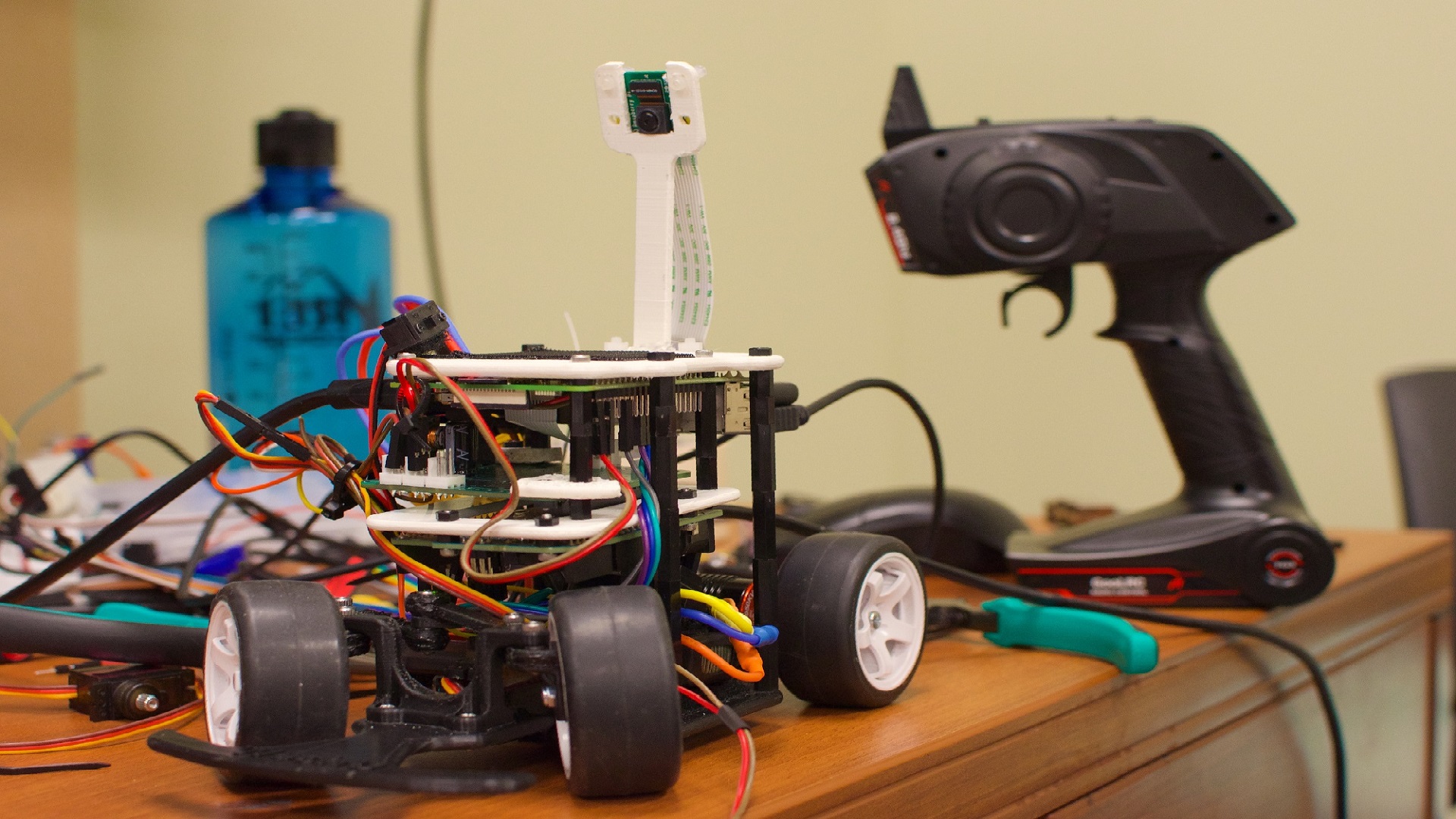
PiCar was created to fill the role of a lab-scale autonomous research platform using a Raspberry Pi microcontroller. It is intended to be easy to build, modify and scale. A simple Pi camera is used for complex computer vision algorithms like optical flow for obstacle avoidance.
Project Details
- Made for: Graduate Research Project
- Date: Spring 2017
-
- Advisors:
- Dr. Humberto Gonzalez
- Dr. Xuan (Silvia) Zhang
- Weblink: PiCar Github
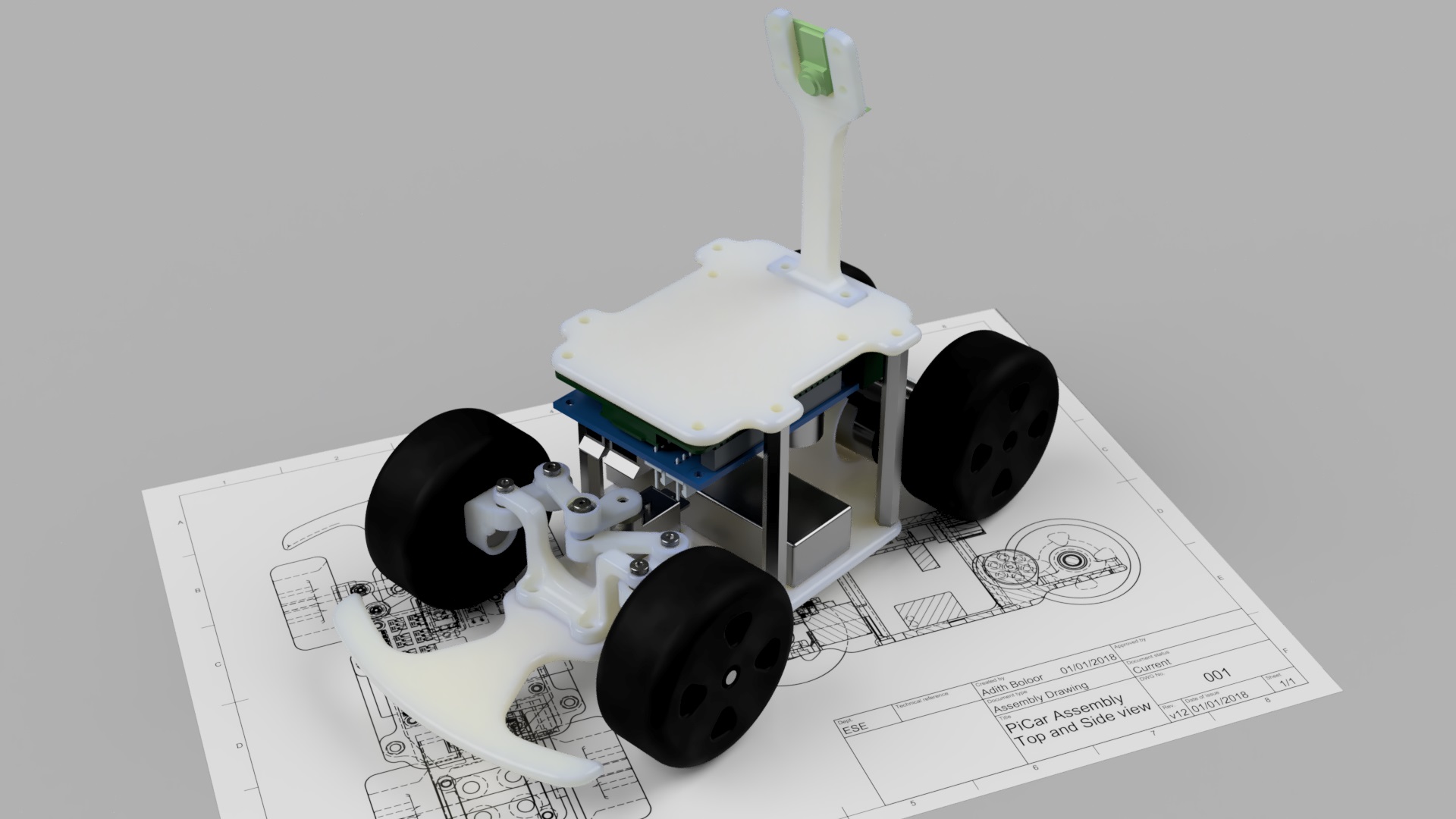
Project Story
I was incharge of the mechanical design for the PiCar. The design was meant to be open-source and flexible. It was also made with 3D printing in mind. I designed the Ackermann steering system for the PiCar to make it similar to cars in the real world. Our team demonstrated the project at the Silk Road Robotics Innovation Competition in Xi'an, China during the Summer of 2017 for which we won the top ten prize.