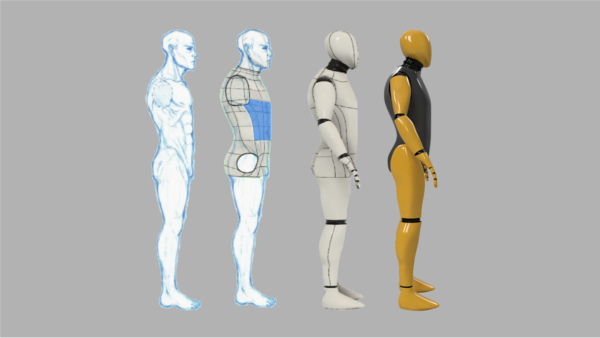
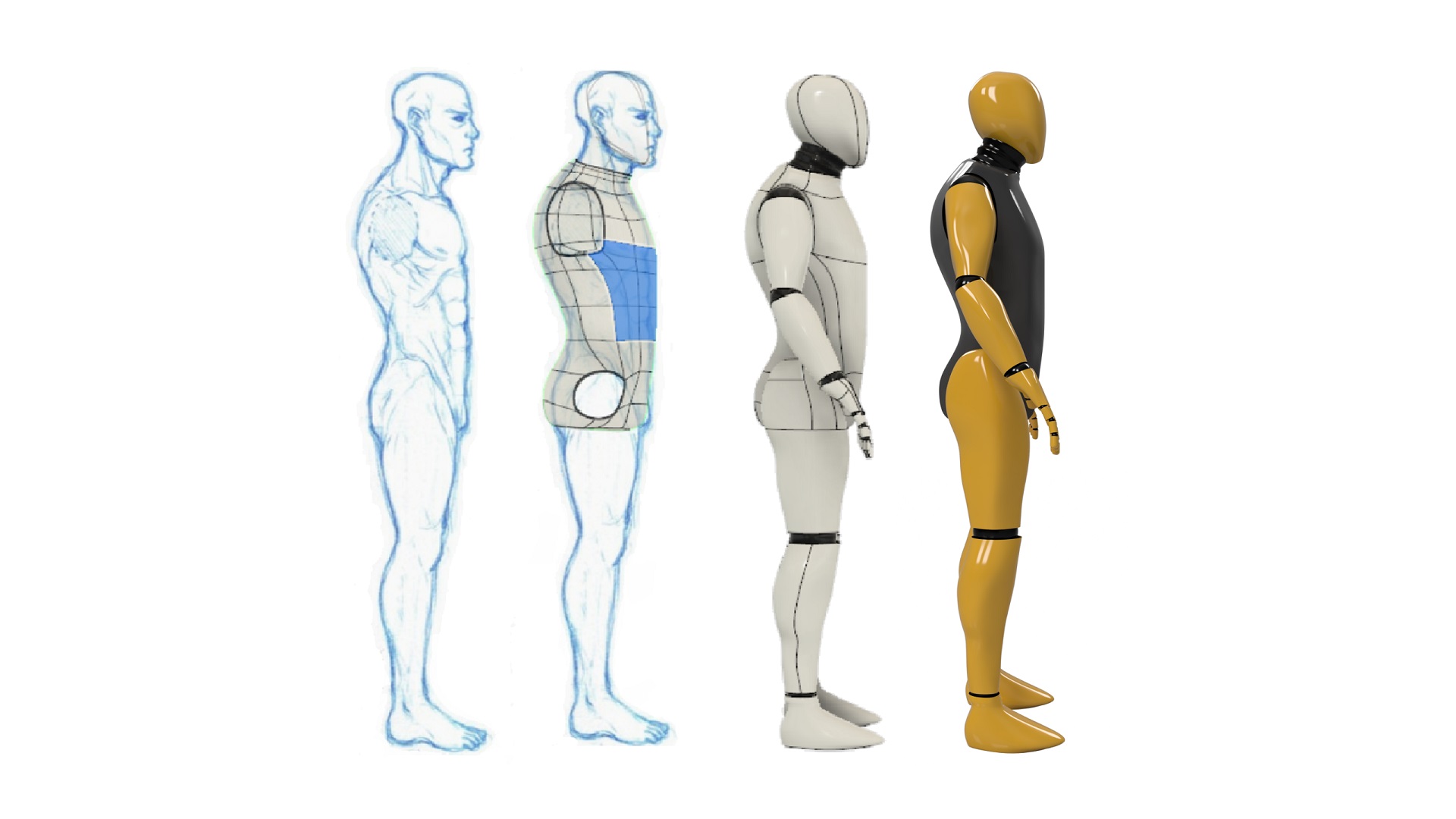
The humanoid robot CAD project was created to practice and demonstrate my computer aided design skills. The model was made using Autodesk Fusion 360's surface modeling (or sculpting) tool. The rendering was also done on Fusion 360.

Project Details
- Made for: Personal Project
- Date: Spring 2018
-
- Software Used:
- Autodesk Fusion 360
- Blender
Project Story
Here is an animation of the robot rendered in Blender using Carnegie Mellon University's motion capture data.
Note that this is an animation and not a simulation. A physics engine was not used for this particular demonstration. The body of the robot was scaled and rigged with Blender's Rigify (skeleton armature) tool to map the different components of the robot to the bones of the skeleton. And the skeleton was mapped to a sequence of poses using the CMU MoCap data to achieve the desired animation.